A while back I wrote an Arduino library to do the tedious bit you add to every bit of code you write for an ESP8266/ESP32 where it tries to connect to the WiFi and waits for it to happen, or not.
This is the most basic stuff and it's in almost every thing I make, frankly almost everything anybody ever makes with an ESP and Arduino. Yet you end up rehashing it and typing it or copy & pasting it. Again and again and again.
So I put it in a library.
It feels like an act of fraud. It's not a fancy connection manager with credential storage. It just tries to connect and feeds back the result. It can optionally stick out a load of diagnostic stuff on the Serial port, which is nice but it still felt like overkill.
Now, inspired by something of Larry Bank's I've made it do geolocation of the device through the https://ipapi.co/ API and it handles the setting of timezone and the system time using NTP.
That is useful as a one-line addition to any network connected project.
A lot of the time people don't bother with their devices 'knowing' the time themselves but I'm a big fan of it and I often use it somehow in my projects.
One of the things I'd quite like to do with my Rover project is have it detect when a person is in front of it and aim a camera at them. The long term goal is that it's a kind of telepresence device, but this is also another way to avoid collision with people and I want as many checks on that as possible.
When these very cheap sensors from Useful Sensors appeared I grabbed a couple.
Their USP is supposed to be that they offload all the machine learning face detection onto a dedicated module you can just get readings from and will even learn specific faces. In practice I found they seemed to be very prone to false positives so I left them sitting unused for a month or two after an initial burst of enthusiasm.
At LARPCon I had a chat with a droid builder who'd brought one of their in-progress projects along which is part-finished B2EMO replica.
This droid has a prominent 'eye' camera, although in practice it's just a drone camera much like I've been experimenting with.
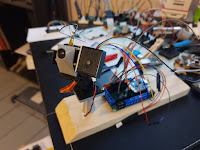
This made me think of the Person Sensor again and have another go with it. For testing I attached it to the cheap pan/tilt setup I have the drone camera in and started trying to filter out the false positives from the Person Sensor.
It became clear pretty quickly that the false positives are very 'bursty', ie. you'll get 2-3 false detections in a row then they disappear. With detection happening at around 5Hz, ignoring any detections with less than four consecutive positives seems to pretty much kill them all without adding much latency.
I then set about making it track the 'best' face and move the pan/tilt setup. After a bit of faffing with preventing constant hunting due to lag I eventually got decent enough tracking so long as the lighting is favourable.
Yes you could do this with a powerful SBC like a Jetson Nano and do it better, but this is doing it with a standalone $10 module and offloading the work. I made a little video of it tracking in my cellar. Beware the static on the audio channel, this video is coming from a USB 5.8GHz receiver and the camera has no microphone.
I think this works passably OK now so I'll be investigating this further and seeing about making a more stable pan/tilt mechanism. I may also wrap the Person Sensor functions up into an Arduino Library for the benefit of others. It's not complicated to use but abstracting stuff into a re-usable library is better.
This weekend I helped crew the UKLTA stand at LARPCon 2023, which as the name suggests is a convention dedicated to LARP.
In the UK we don't really have a 100% definitive 'must do' LARP convention but LARPCon is the closest we have.
A lot of it is dedicated to traders and there's a heavy 'fantasy and foam weapons' slant from both the attendees and the stands. So it made our representation of sci-fi/modern/light mil-sim games using Lasertag weapons something unusual.
Overall though it was a very positive thing to do. I ended up spending a chunk of time talking to people with similar interests and had taken a few of my interactive props along. This was a bit of a last minute decision but I'm glad I did.
Old things like ORAC and my Enigma machine were cooed over, they make great 'showboat' props because they fill a small table and are immediately recognisable. So they did the job of helping get people over to talk to us.
I ran into a bunch of people interested in making interactive props who asked for my contact details and I'm hoping they get in touch after the event.