
When these very cheap sensors from Useful Sensors appeared I grabbed a couple.
Their USP is supposed to be that they offload all the machine learning face detection onto a dedicated module you can just get readings from and will even learn specific faces. In practice I found they seemed to be very prone to false positives so I left them sitting unused for a month or two after an initial burst of enthusiasm.
At LARPCon I had a chat with a droid builder who'd brought one of their in-progress projects along which is part-finished B2EMO replica.
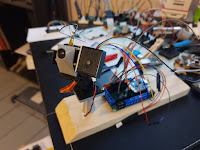
This made me think of the Person Sensor again and have another go with it. For testing I attached it to the cheap pan/tilt setup I have the drone camera in and started trying to filter out the false positives from the Person Sensor.
It became clear pretty quickly that the false positives are very 'bursty', ie. you'll get 2-3 false detections in a row then they disappear. With detection happening at around 5Hz, ignoring any detections with less than four consecutive positives seems to pretty much kill them all without adding much latency.
I then set about making it track the 'best' face and move the pan/tilt setup. After a bit of faffing with preventing constant hunting due to lag I eventually got decent enough tracking so long as the lighting is favourable.
Yes you could do this with a powerful SBC like a Jetson Nano and do it better, but this is doing it with a standalone $10 module and offloading the work. I made a little video of it tracking in my cellar. Beware the static on the audio channel, this video is coming from a USB 5.8GHz receiver and the camera has no microphone.
I think this works passably OK now so I'll be investigating this further and seeing about making a more stable pan/tilt mechanism. I may also wrap the Person Sensor functions up into an Arduino Library for the benefit of others. It's not complicated to use but abstracting stuff into a re-usable library is better.
No comments:
Post a Comment